
-
 FRIENDSFleet of dRones for radIological inspEction, commuNication anD reScue
FRIENDSFleet of dRones for radIological inspEction, commuNication anD reScue -
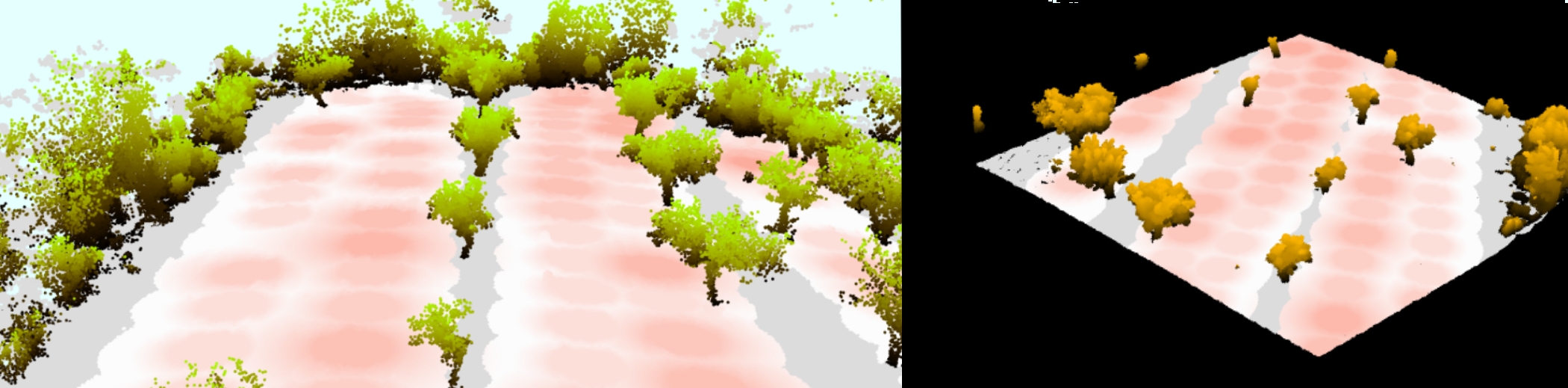
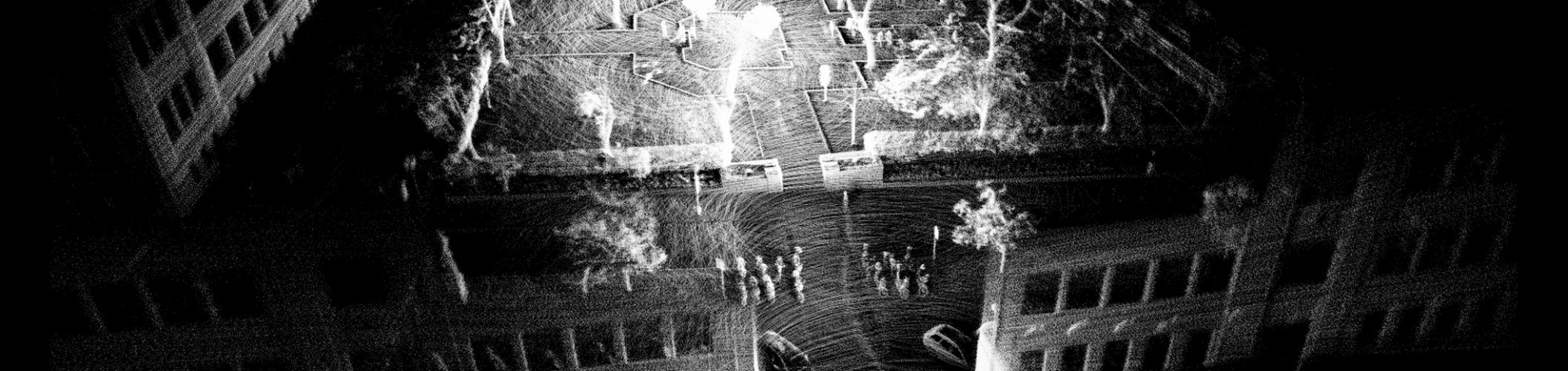 3D mapsReconstruction based on LIDAR
3D mapsReconstruction based on LIDAR -
 Autonomous navigationCommunication between the fleet and a ground station
Autonomous navigationCommunication between the fleet and a ground station -
 Radiological inspectionLocalize and quantify sources of radiation
Radiological inspectionLocalize and quantify sources of radiation -
 Real experimentsIn old ore mines
Real experimentsIn old ore mines
Activated components can be found in addressed scenarios, such as in reactor outages, laboratory test facilities, storage areas with contaminated loads for fusion and fission reactors and with particular equipment used, for instance, in health physics. Criminal or unauthorized acts involving nuclear or other radioactive material have also to be considered and, hence, public scenarios including airports are envisaged. However, given the growing use of nuclear reactions as a versatile and powerful tool, the risk of nuclear accidents cannot be neglected. Indeed, the search and rescue operations in scenarios of nuclear disaster tackle an important challenge already for the present. In most cases, the sites become cluttered with malfunctioning or broken communication infrastructures, preventing sending and receiving information from the outside world.
Unmanned aerial vehicles (UAV), commonly known as "drones" are a technology that grew faster than the potential applications. Drones are able to carry out different missions of inspection and supervision in most of the scenarios with the minimum disturbance. A drone is a cheap and easily replaceable device, providing the needs for an easy fleet construction, in particular, in scenarios with presence of hazardous radiation. A coordinated fleet can support operations with human operators at a safe distance.
FRIENDS will follow a three-tier approach for radiological characterization:
Scouting, Monitoring, and Inspection
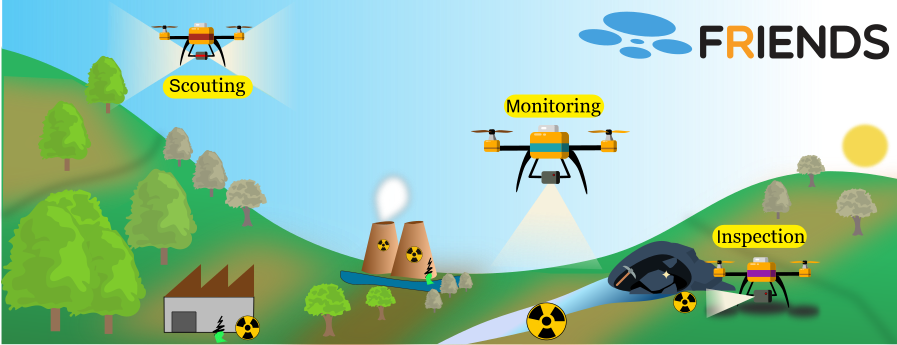
The objectives of the project are to design, develop and validate a fleet of drones equipped with navigation and radiological sensors for inspection and monitoring of scenarios with nuclear threats. The fleet under a cooperative navigation system will perform:
- Scouting — Map the scenario
- Monitoring — Localize and quantify the sources of radiation
- Inspection — Evaluate the level of threats
The three main tasks in parallel are:
drone navigation, data collection and radiological analysis
The synergy of the research labs involved, namely from Association of Instituto Superior Técnico for Research and Development (IST-ID) -- IPFN, ISR, C2TN, and IT - Aveiro, will be exploited for the success of the project, given their experience and background on nuclear science, robotics and communications. In addition, the campus of IST in C2TN, provides excellent test facilities with a controlled storage building of activated components to perform validation of the developed solution.
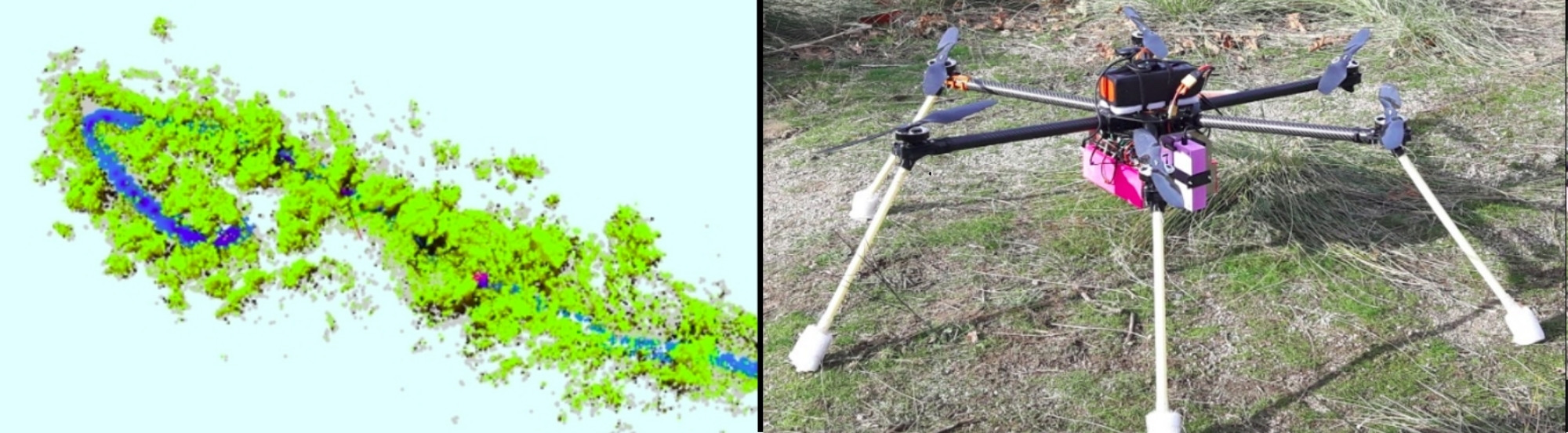
Our team is working together in three main tasks, namely: 1) to design, assemble and tune several drones capable of carrying radiological sensors and perform accurate waypoint navigation, 2) to assemble and program a fully-fledged sensor box that collects data from a LIDAR, Geiger-Muller counters and gamma spectroscopy sensors (CZT), and finally 3) to configure, calibrate and automatically analyse radiological data coming from onboard sensors.
Technical Sheet
| Designação do projeto | FRIENDS: Frota de drones para inspeção radiológica, comunicação e salvamento |
| English | FRIENDS: Fleet of dRones for radIological inspEction, commuNication anD reScue |
| Código Projecto | PTDC/EEI-ROB/28799/2017 |
| Objetivo principal | OT 1 - Reforçar a investigação, o desenvolvimento tecnológico e a inovação |
| Desenvolvimento de solução com veículos aéreos não tripulados (UAV) para suporte de comunicação em missões de busca e salvamento em cenários de desastre e na presença de material radioativo com UAV que permitem a inspeção e monitorização no combate ao terrorismo com recurso a material nuclear. | |
| Região de intervenção | Centro 15,58 % ; Lisboa 84,42 % |
| Entidade Promotora | IST-ID ; IT-UA |
| Investigador Responsável | Alberto Vale |
| Data de aprovação | 23/03/2018 |
| Data de início | 01/10/2018 |
| Data de conclusão | 30/06/2022 |
| Custo total elegível | 290013.68 EUR |








