Research
First Trials - Proof of Concept

 In 2019, while the drones were being assembled in IT-Aveiro, IPFN/ISR was focussed on developing the first Sensorbox prototype.
In 2019, while the drones were being assembled in IT-Aveiro, IPFN/ISR was focussed on developing the first Sensorbox prototype.
This prototype carries a vast set of sensors, namely a: RGBD camera Structure, later replaced by a RealSense D415, an Infrared/RGB camera FLIR Duo R, a LiDAR Velodyne VLP-16, and two Geiger~Müller counters, a Mazur PRM-9000 and a SparkFun Geiger Counter
Inside, a small computer (NVIDIA TK2) is installed to read and record data. A 3D reconstruction of the Mechanical Department of IST campus is shown on the left, simultaneously with thermal, depth and video image.
At the same time, experiments with weak radioactive sources were performed to analyze the feasability of measuring raadioactivity with the sensorbox equipped with a portable Geiger Muller Counter.
First Flight
First Drone flight without payload was also performed in 2019 and since then we have made several improvments, namely its landing stability.
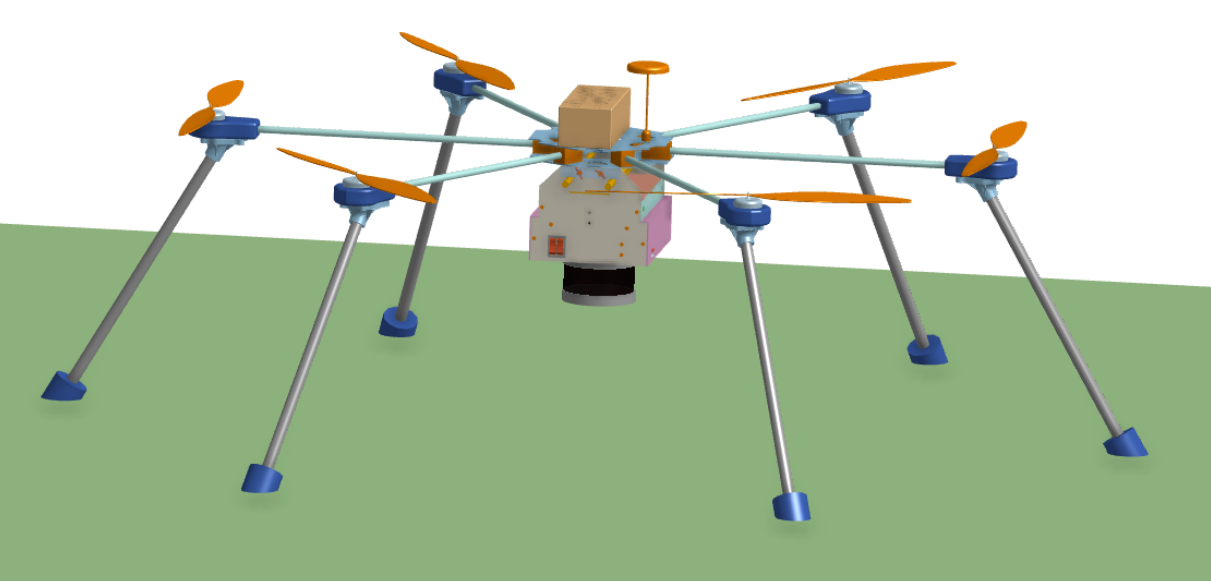
The fleet is composed by 3 hexarotors. The biggest drone illustrated in the pictures below is designed to support the weight of all the sensors onboad, mainly the Velodyne VLP16 LiDAR.
An hexarotor was chosen to increase motor redundancy and maximum payload capacity, given the expected weight of the Sensorbox
| Item | Part | Details |
|---|---|---|
| Frame | Tarot 960 (960 mm) | given a heatmapQuanum carbon fiber 33cm propellers |
| Motors | Tarot 5008/340 KV | Hobbywing XRotor Pro 40A Electronic Speed Controller (ESC) |
| Autopilot | Pixhawk 4 | GNSS u-blox Neo-M8N |
| Battery | Turnigy Graphene LiPo | 12,000 mAh 6S (22.2 V) |
The maximum payload is 2.5 kg and has an autonomy up to 30 min. CAD and photograph can be found bellow.

Multi-drone Flight
In 2020, research focussed on developing cooperation and communication between multiple vehicles.
The Groundstation is now able to control several drones simultaneously, providing them with flight instructions.
Missions: Scouting, Monitoring and Inspection
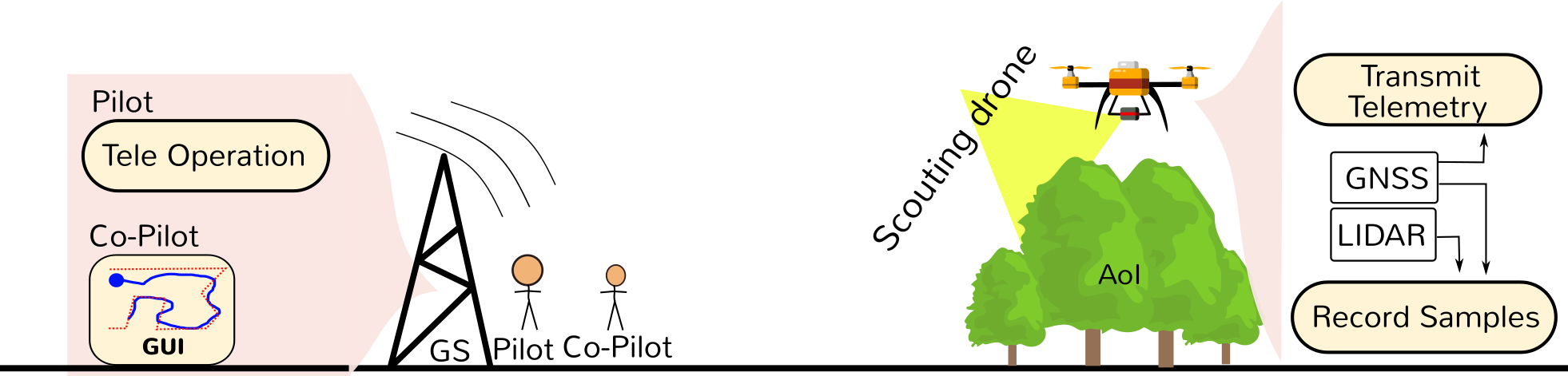
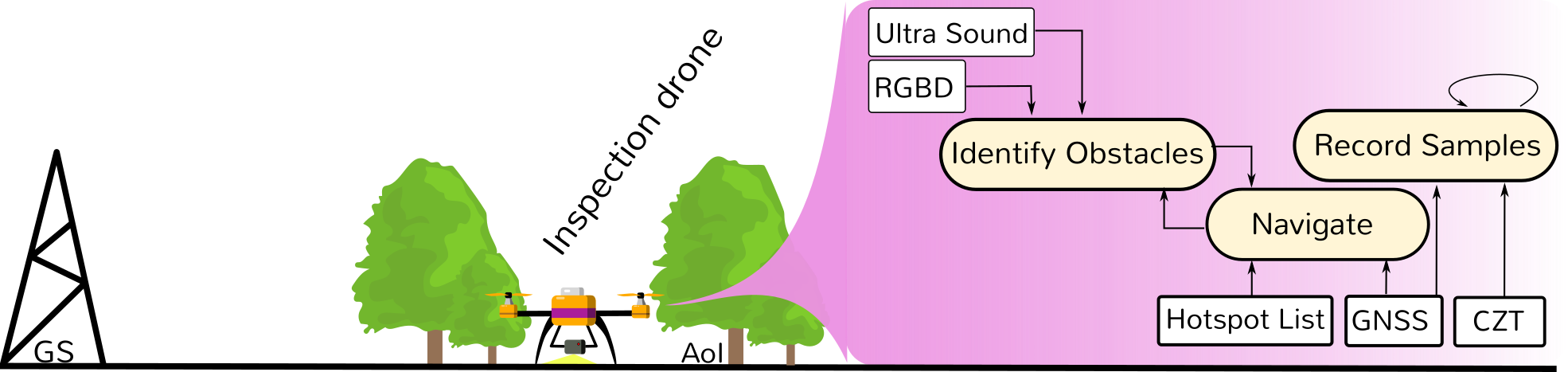
In 2021, the complex mission behaviour was started to be developed. Groundstation is able to issue flight commands and also initiate and stop complex missions in particular Scouting, Monitoring and Inspection operations.
Scouting
Scouting goal is to obtain a 3D map of the scenario under analysis. Its first phase is composed by the flight and onboard data collection.
Path followed by the drone, as recorded by the GNSS and estimated by the SLAM algorithm (ALOAM) are similar allowing georeferencing our 3D maps
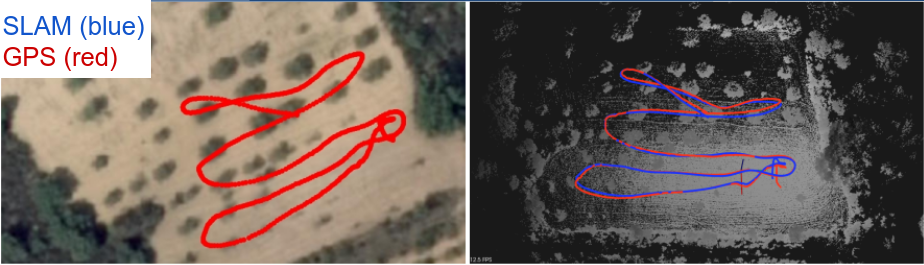
Segmentation process is done to identify ground surface from obstacles above it.
In the end of 2020, we were able to execture Scouting operations under manual flight control and we obtained the results shown below.
Monitoring
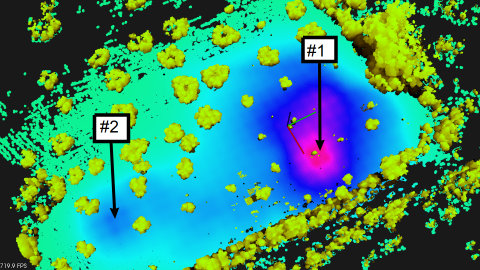
Monitoring goal is to obtain a 3D heatmap of the scenario under analysis, i.e., the regions of interest related to radiological information. Its first phase is composed by the flight and onboard GMC data collection.

In the end of 2020, we were able to execture Monitoring operations under manual flight control in naturally radioactive scenarios and we obtained the results shown below.
Inspection
Given a heatmap, some locations represent its local-maxima, and are marked for inspection (list of regions of interest).
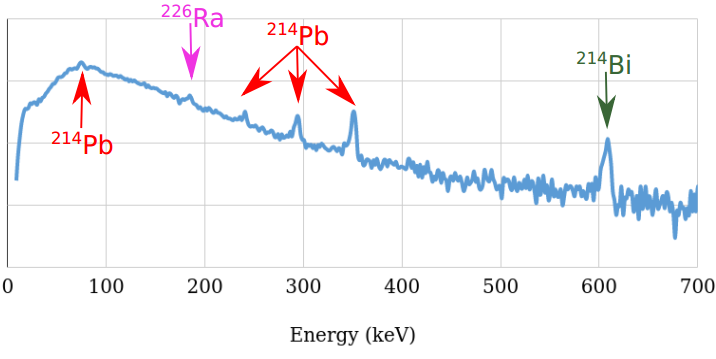
Inspection goal is to obtain a signature of the radionuclides of such locations.
Its first phase is composed by the flight and onboard CZT data collection. We expect to achieve fully autonomous flight, soon.
In the end of 2020, we were able to execute Inspection operations under manual flight control and we identified Lead, Radium and Bismuth as the main elements in the regions of interest.